DeepLearning
#deepLearning/notes
回归问题 (Regression problem)
线性回归 (Linear regression)
神经元输入向量\(x=[x_{1},x_{2},…,x_{n}]^T\), 经过函数映射\(f_{θ}:x->y\)后得到输出y, 其中θ为函数f自身的参数。一种简单的情形是线性变换:\(f(x)=w^Tx+b\)
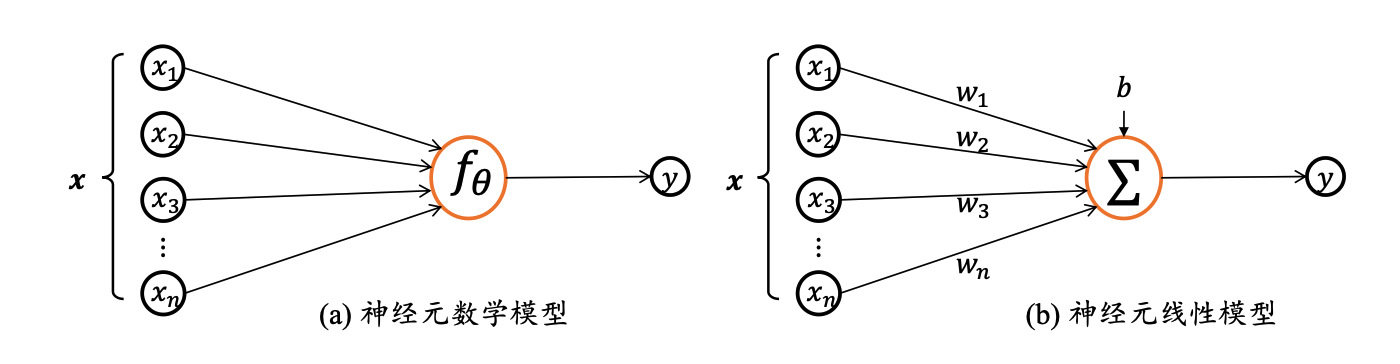
\(w\)称为权重 (weight),权重决定了每个特征对我们预测值的影响。 \(b\)称为偏置(bias)、偏移量 (offset) 或截距 (intercept) 。 偏置是指当所有特征都取值为0时,预测值应该为多少。
而在机器学习领域,我们通常使用的是高维数据集,建模时采用线性代数表示法会比较方便。 当我们的输入包含\(d\)个特征时,我们将预测结果\(\hat{y}\) (通常使用“尖角”符号表示\(y\)的估计值)表示为: \[\hat{y} = w_1 x_1 + ... + w_d x_d + b\] 将所有特征放到向量\(\mathbf{x} \in \mathbb{R}^d\), 并将所有权重放到向量\(\mathbf{w} \in \mathbb{R}^d\)中, 我们可以用点积形式来简洁地表达模型: \[\hat{y} = \mathbf{w}^\top \mathbf{x} + b\]
损失函数 (Loss function)
考虑对于任何采样点,都有可能 存在观测误差,我们假设观测误差变量𝜖属于均值为𝜇,方差为\(𝜎^2\) 的正态分布(Normal Distribution,或高斯分布,Gaussian Distribution): \({\mathcal{N}}(\mu,\sigma^{2})\),则采样到的样本符合: \[𝑦 = 𝑤𝑥 + 𝑏 + 𝜖, 𝜖~{\mathcal{N}}(\mu,\sigma^{2})\] 一旦引入观测误差后,即使简单如线性模型,如果仅采样两个数据点,可能会带来较大估 计偏差。如图 2.4 所示,图中的数据点均带有观测误差,如果基于蓝色矩形块的两个数据 点进行估计,则计算出的蓝色虚线与真实橙色直线存在较大偏差。为了减少观测误差引入 的估计偏差,可以通过采样多组数据样本集合\(𝔻 = \{(x^{(1)},y^{(1)}),\bigl(x^{(2)},y^{(2)}\bigr),\ldots,\bigl(x^{(n)},y^{(n)}\bigr)\}\)然后找出一条“最好”的直线,使得它尽可能地 让所有采样点到该直线的误差(Error,或损失 Loss)之和最小。

求出当前模型的 所有采样点上的预测值\(𝑤𝑥^{(𝑖)} + 𝑏\)与真实值\(𝑦^{(𝑖)}\)之间的差的平方和作为总误差\(\mathcal{L}\): \[{\mathcal{L}}=\frac{1}{n}\sum_{i=1}^{n}(w x^{(i)}+b-y^{(i)})^{2}\] 然后搜索一组参数\(𝑤^∗, 𝑏^∗\)使得\(\mathcal{L}\)最小,对应的直线就是我们要寻找的最优直线: \[w_{i}^*,b^{\ast}=\arg\operatorname*{min}_{w,b}\frac{1}{n}\sum_{i=1}^{n}(w x^{(i)}+b-y^{(i)})^{2}\] 这种误差计算方法称为均方误差(Mean Squared Error,简称 MSE)。
计算损失
# y = wx + b |
梯度下降法 (Gradient descent)
我们需要找到一组参数\(w^*\)和\(b^*\),使得ℒ最小。
梯度下降算法(Gradient Descent)是神经网络训练中最常用的优化算法,配合强大的图形处理芯片GPU(Graphics Processing Unit)的并行加速能力,非常适合优化海量数据的神经网络模型,自然也适合优化我们这里的神经元线性模型。
函数的梯度(Gradient)定义为函数对各个自变量的偏导数(Partial Derivative)组成的向量。考虑 3 维函数\(𝑧 = 𝑓(𝑥, 𝑦)\),函数对自变量𝑥的偏导数记为\({\frac{\partial z}{\partial x}}\), 函数对自变量\(𝑦\)的偏导数记为\({\frac{\partial z}{\partial y}}\),则梯度\(∇𝑓\)为向量\(({\frac{\partial z}{\partial x}},{\frac{\partial z}{\partial y}})\)。
函数在各处的梯度方向\(∇𝑓\)总是指向函数值增 大的方向,那么梯度的反方向\(−∇𝑓\)应指向函数值减少的方向。利用这一性质,我们只需要 按照 \[x^{\prime}=x-\eta\cdot\nabla f\] 来迭代更新\(x^{\prime}\),就能获得越来越小的函数值,其中𝜂用来缩放梯度向量,一般设置为某较小的值,如 0.01、0.001 等。特别地,对于一维函数,上述向量形式可以退化成标量形式: \[x^{\prime}=x-\eta\cdot{\frac{\mathrm{d}y}{\mathrm{d}x}}\] 通过上式迭代更新\(x^{\prime}\)若干次,这样得到的\(x^{\prime}\)处的函数值\(y^{\prime}\),总是更有可能比在\(𝑥\)处的函数值\(𝑦\)小。 通过上式优化参数的方法称为梯度下降算法,它通过循环计算函数的梯度\(∇𝑓\)并 更新待优化参数\(𝜃\),从而得到函数\(𝑓\)获得极小值时参数\(𝜃\)的最优数值解。
需要优化的模型参数是𝑤和𝑏,因此我们按照下面方式循环更新参数。 \[w^{\prime}=w-\eta{\frac{\partial\mathcal{L}}{\partial w}}\] \[b^{\prime}=b-\eta{\frac{\partial{\mathcal{L}}}{\partial b}}\]
计算梯度
def step_gradient(b_current, w_current, points, learningRate): |
反向传播 (Backward propagation)
逻辑回归的推导:
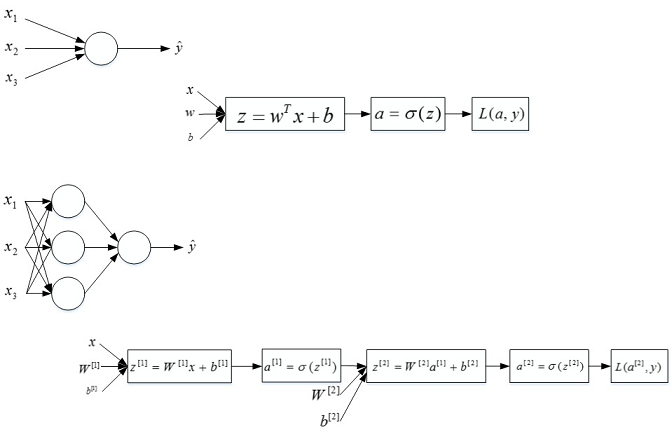
\[\left. \begin{matrix} {x} \\ {w} \\ {b} \\ \end{matrix} \right\}\Longrightarrow\mathrm{~}z=w^{T}x+b\implies\alpha=\sigma(z)\mathrm{~}\Longrightarrow L\left(a,y\right)\] 正向传播步骤:计算\(z^{[1]}, a^{[1]}\),然后\(z^{[2]},a^{[2]}\),然后损失函数\(L\)
$$_{d{w}=d{z} x,d{b}=d{z}}
_{d{z}=d{a}g^{'}(z),g(z)!=!(z)!, !=!,,,g!(z)!=!g^{'}(z)}
\underbrace{\alpha=\sigma(z)\mathrm{~}\Longrightarrow L\left(a,y\right)}_{d a={\frac{d}{d a}}\,L{\big(}a,y{\big)}=\left(-y\log\alpha-{\big(}1-y{\big)}\log{\big(}1-a{\big)}\right)^{\prime}=-\,{\frac{y}{a}}+{\frac{1-y}{1-a}}}$$前向传播: 计算\(z^{[1]}\), \(a^{[1]}\), 再计算\(z^{[2]}\), \(a^{[2]}\),,最后得到loss function。
反向传播: \[dz^{[2]}=a^{[2]}-Y\]
\[dW^{[2]}=\frac{1}{m}dz^{[2]}a^{[1]T}\]
\[{\cal
L}\,=\,\frac{1}{m}\sum_{i}^{n}\,L(\hat{y},y)\] \[db^{\left[2\right]}=\frac{1}{m}np.sum(dZ^{\left[2\right]},axis=1,keepdims=True)\]
\[d Z^{[1]}=W^{[2]T}d
Z^{[2]}*g^{[1]\prime}(Z^{[1]})\] \[d
W^{[1]}=\frac{1}{m}d Z^{[1]}X^{T}\] \[db^{\left[1\right]}=\frac{1}{m}np.sum(dZ^{\left[1\right]},axis=1,keepdims=True)\]
# Backward propagation: calculate dW1, db1, dW2, db2.
### START CODE HERE ### (≈ 6 lines of code, corresponding to 6 equations on slide above)
dZ2 = A2 - Y
dW2 = np.dot(dZ2, A1.T) / m
db2 = np.sum(dZ2, axis = 1, keepdims = True) / m
dZ1 = np.multiply(np.dot(W2.T,dZ2), 1 - np.power(A1, 2))
dW1 = np.dot(dZ1, X.T) / m
db1 = np.sum(dZ1, axis = 1, keepdims = True) / m
神经网络概述(Neural Network Overview)
 ##
神经网络的表示(Neural Network Representation )
##
神经网络的表示(Neural Network Representation )
单隐藏层神经网络就是典型的浅层(shallow)神经网络
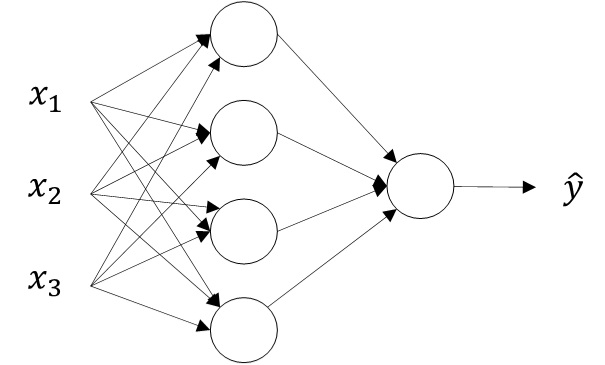 单隐藏层神经网络也被称为两层神经网络(2 layer NN)
单隐藏层神经网络也被称为两层神经网络(2 layer NN)
第\(l\)层的权重\(W^{[l]}\)叫维度的行等于\(l\)层神经元的个数,列等于\(l-1\)层神经元的个数; 第\(i\)层常数项维度的行等于\(I\)层神经元的个数,列始终为1 ## 计算一个神经网络的输出(Computing a Neural Network's output )
两层神经网络可以看成是逻辑回归再重复计算一次
逻辑回归的正向计算可以分解成计算\(z\)和\(a\)的两部分:
\[z=w^{T}x+b\]
\[ a=\sigma(z)\]
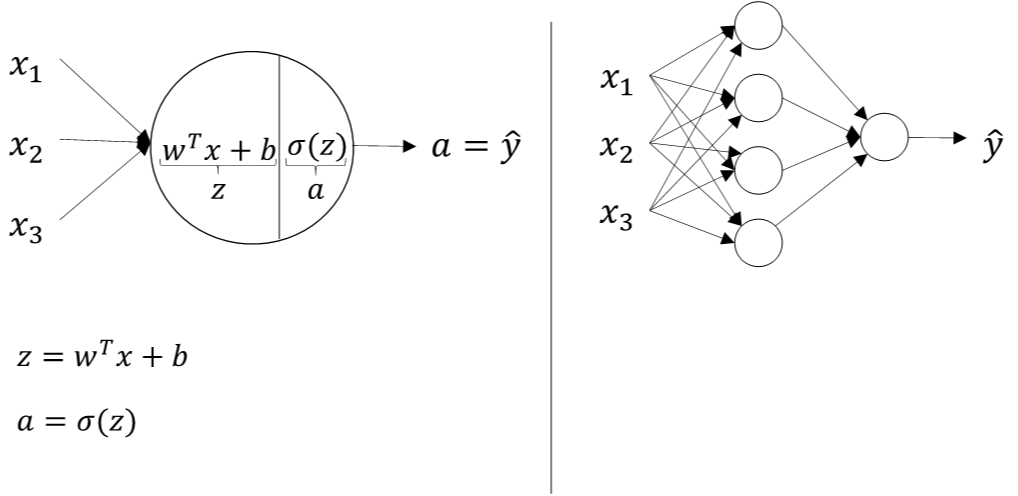
两层神经网络,从输入层到隐藏层对应一次逻辑回归运算;从隐藏层到输出层对应一次逻辑回归运算 \[z^{[1]}=W^{[1]}x+b^{[1]}\]
\[a^{[1]}\ =\sigma(z^{[1]})\] \[z^{[2]}=W^{[2]}a^{[1]}+b^{[2]}\] \[a^{[2]}\ =\sigma(z^{[2]})\] 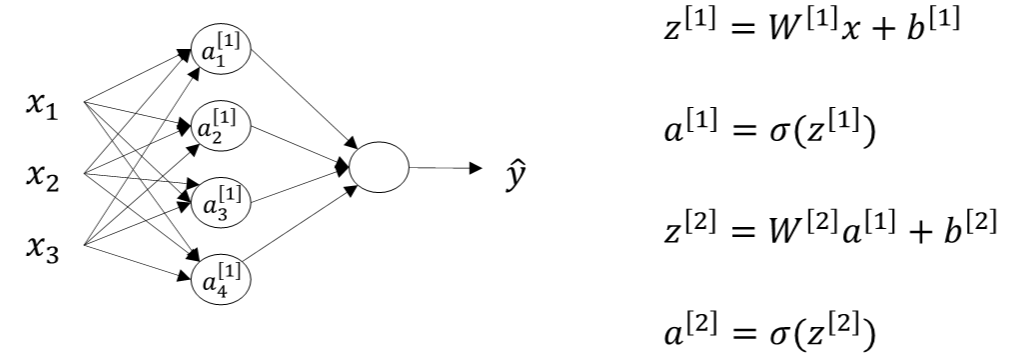
多样本向量化(Vectorizing across multiple examples )
矩阵运算的形式: \[{Z}^{[1]}=W^{[1]}{X}+b^{[1]}\] \[A^{(1)}=\sigma(Z^{(1)})\] \[Z^{(2)}=W^{[2]}A^{[1]}+b^{[2]}\] \[A^{(2)}=\sigma(Z^{(2)})\]
行表示神经元个数,列表示样本数目 m
激活函数(Activation functions)
sigmoid函数 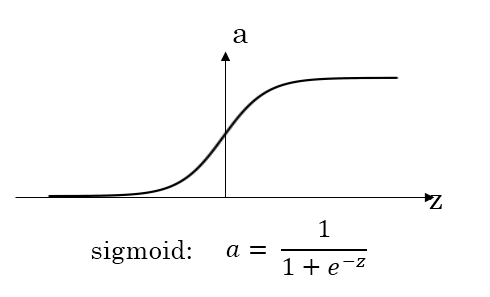
tanh函数 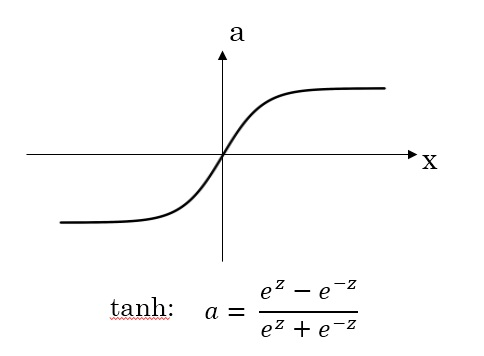
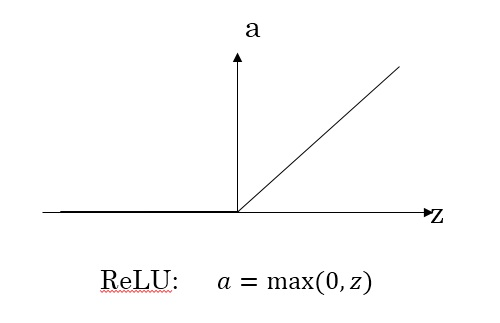
ReLU函数
Leaky ReLU函数 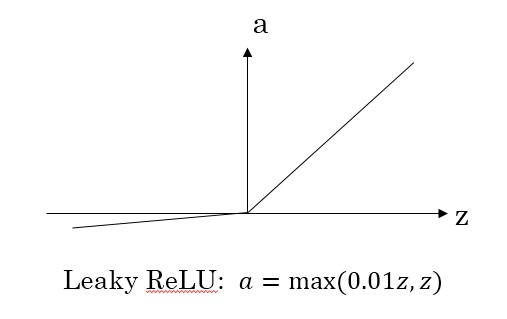
对于隐藏层的激活函数,\(tanh\)函数要比\(sigmoid\)函数表现更好一些。因为\(tanh\)函数的取值范围在\([-1,+1]\)之间,隐藏层的输出被限定在\([-1,+1]\)之间,可以看成是在0值附近分布,均值为0。这样从隐藏层到输出层,数据起到了归一化(均值为0)的效果。
对于输出层的激活函数,因为二分类问题的输出取值为\({0,+1}\),所以一般会选择\(sigmoid\)作为激活函数选择\(ReLU\)作为激活函数能够保证\(x\)大于零时梯度始终为1,从而提高神经网络梯度下降算法运算速度。但当\(z\)小于零时,存在梯度为0的缺点
\(Leaky ReLU\)激活函数,能够保证\(z\)小于零时梯度不为0
深层神经网络(Deep Neural Networks)
深层神经网络(Deep L-layer neural network)
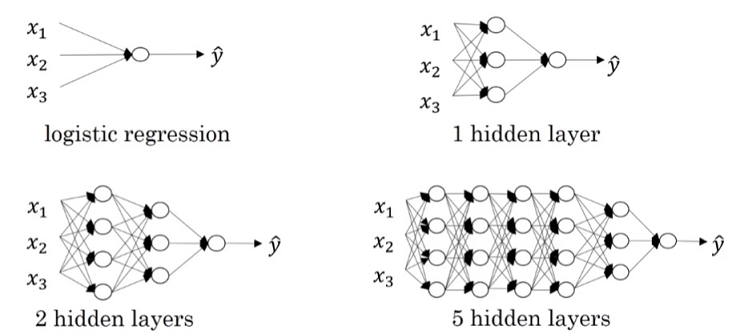
\(L−layer NN\),则包含了\(L−1\)个隐藏层,最后的\(L\)层是输出层 \(a^{[l]}\)和\(W^{[l]}\)中的上标\(l\)都是从\(1\)开始的,\(l=1,⋯,L\) 输\(x\)记为\(a^{[0]}\), 把输出层\({\hat{y}}\)记为\(a^{[L]}\) 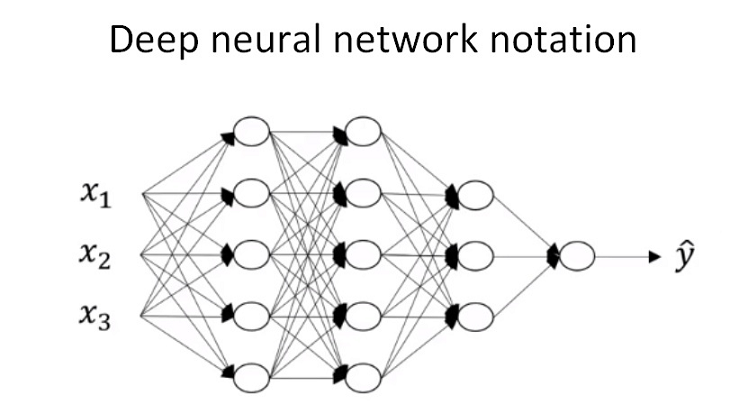 ##
前向传播和反向传播(Forward and backward propagation)
##
前向传播和反向传播(Forward and backward propagation)
正向传播过程
\[z^{[l]}=W^{[l]}a^{[l-1]}+b^{[l]}\] \[a^{[l]}=g^{[l]}(z^{[l]})\]
m个训练样本,向量化形式为: \[Z^{[l]}=W^{[l]}A^{[l-1]}+b^{[l]}\] \[A^{[l]}=g^{[l]}(z^{[l]})\] ###
反向传播过程 \[d z^{[l]}=d
a^{[l]}*g^{[l]^{'}}(z^{[l]})\] \[d
W^{[l]}=d z^{[l]}\cdot a^{[l-1]^{T}}\] \[d b^{[l]}=d z^{[l]}\] \[d a^{[l-1]}=W^{[l]T}\cdot d z^{[l]}\]
得到: \[d z^{[l]}=W^{[l+1]T}\cdot d
z^{[l+1]}\ast
g^{[l]'}(z^{[l]})\]m个训练样本,向量化形式为:
\[d Z^{[l]}=d
A^{[l]}*g^{[l]^{\prime}}(Z^{[l]})\] \[d W^{[l]}=\frac{1}{m}d Z^{[l]}\cdot
A^{[l-1]T}\] \[d b^{[l]}=\frac{1}{m}n
p.s u m(d Z^{[l]},a x i s=1,k e e p d i m=T r u e)\] \[d A^{\left[l-1\right]}=W^{\left[l\right]T}\cdot d
Z^{\left[l\right]}\] \[d
Z^{[l]}=W^{[l+1]T}\cdot d Z^{[l+1]}\ast
g^{[l]^{\prime}}(Z^{[l]})\] 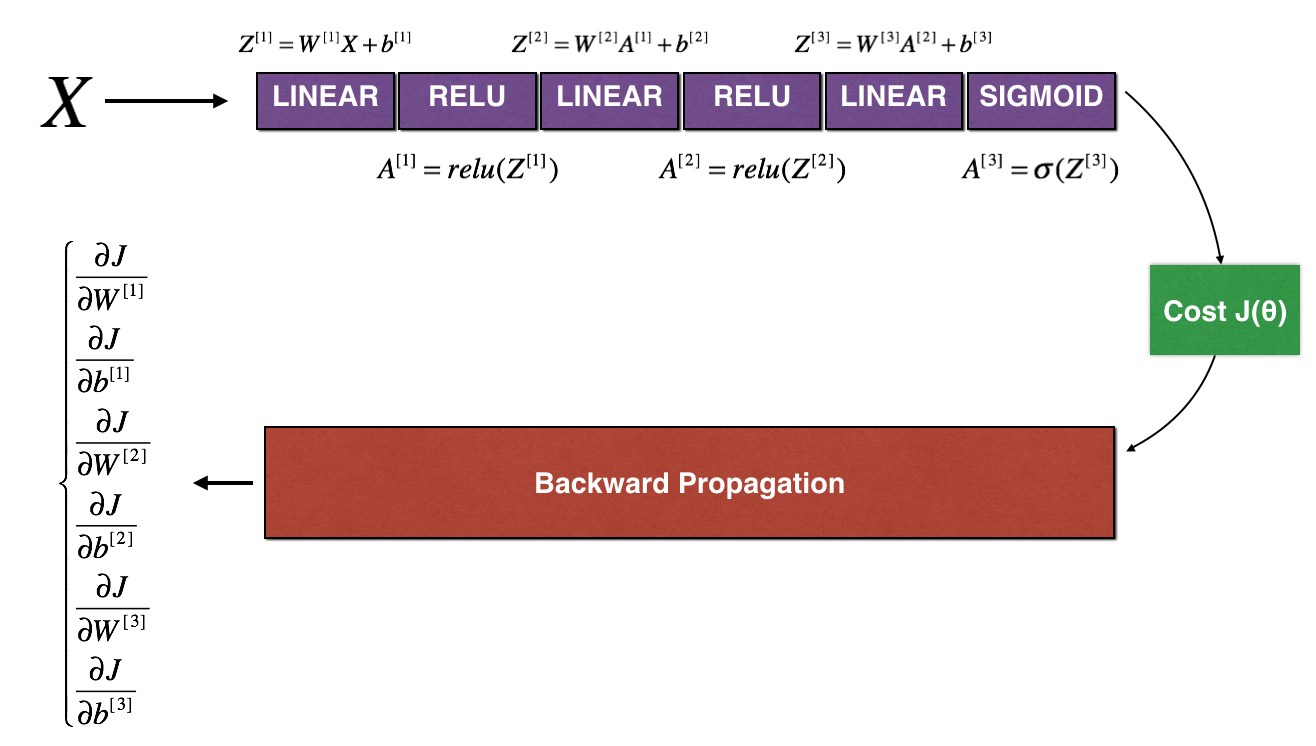 ##
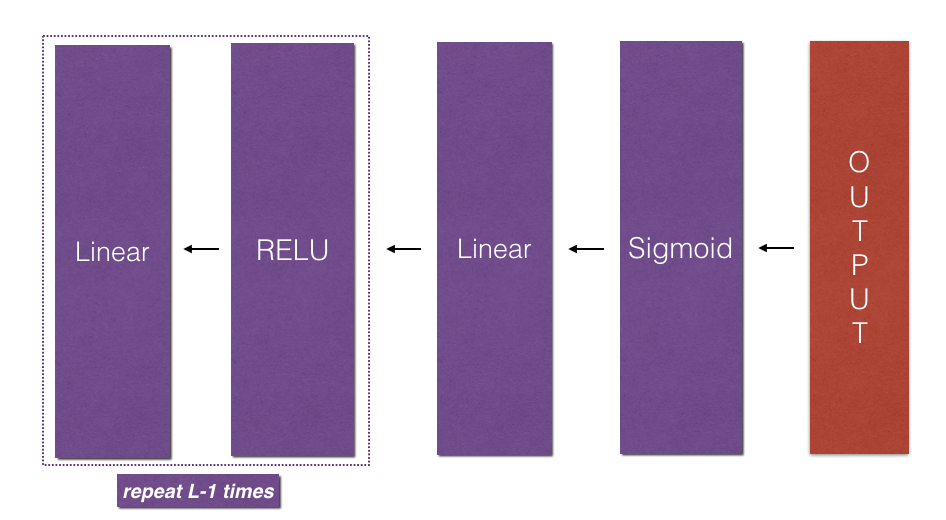
层网络中的前向传播(Forward propagation in a Deep Network )
##
层网络中的前向传播(Forward propagation in a Deep Network )
对于第\(l\)层,其正向传播过程的\(Z^{[l]}\)和\(A^{[l]}\)可以表示为: \[Z^{[l]}=W^{[l]}A^{[l-1]}+b^{[l]}\] \[A^{[l]}=g^{[l]}(Z^{[l]})\] 其中\(l=1,\cdots,L\)
搭建神经网络块(Building blocks of deep neural networks)
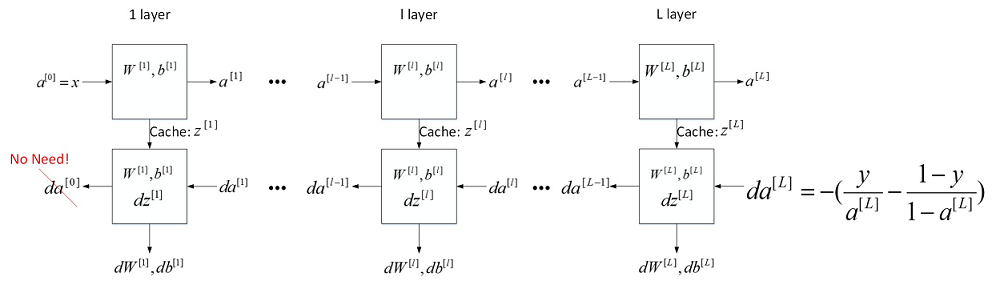
第\(l\)层的流程块图 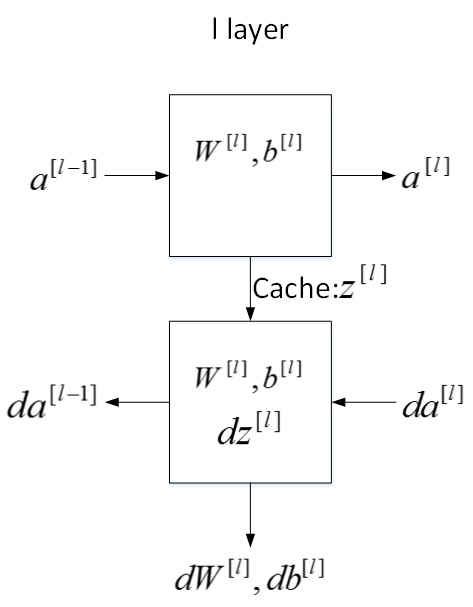 对于神经网络所有层,整体的流程块图正向传播过程和反向传播过程如下所示:
对于神经网络所有层,整体的流程块图正向传播过程和反向传播过程如下所示:
 ##
参数 VS 超参数(Parameters vs Hyperparameters)
##
参数 VS 超参数(Parameters vs Hyperparameters)
神经网络中的参数是\(W^{[l]}\)和\(b^{[l]}\) 超参数则是例如学习速率\(\alpha\),训练迭代次数\(N\),神经网络层数\(L\),各层神经元个数\(n^{[l]}\),激活函数\(g(z)\)等 叫做超参数的原因是它们决定了参数\(W^{[l]}\)和\(b^{[l]}\)的值
如何设置最优的超参数: 通常的做法是选择超参数一定范围内的值,分别代入神经网络进行训练,测试cost function随着迭代次数增加的变化,根据结果选择cost function最小时对应的超参数值